
| 前段时间自己diy了一个无线监控坦克,一直没时间写教程,今天开始五一放假了,趁现在有点时间就向送上部分教程,一点一点添加吧,争取五一节全部完成!这个树莓派教程不是针对高手的,所以高手们就不要见怪了…..废话不多说了! 准备材料:1.树莓派2.全功能扩展板(购买链接)扩展板的详细说明在这里:http://ukonline2000.blog.163.com/blog/static/540213702012713111516799/ 3.小车底盘,x宝上很多,2驱/4驱都可以,2驱便宜,4驱鬼一点,使用4驱的时候将同侧的电机并在一起当成一个用就行了 注:用全功能扩展板的话,可以通过GPIO接电机,不需要驱动板,可以省点钱,呵呵 4.USB摄像头,最好是linux下免驱的并且可以直接插在树莓派上用,不需要外部供电的(有些摄像头电流太大,树莓派的USB拖不起来) 我用的是罗技C110,电流小,带mic,外型小巧又比较好固定
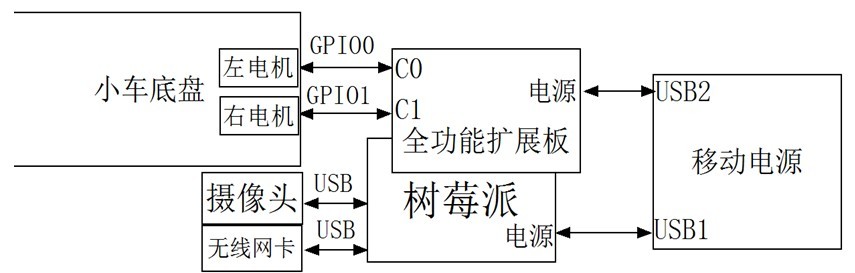
源程序: 教程一(USB摄像头的安装使用): root@raspberrypi:/# lsusb root@raspberrypi:/# ls /dev/vid* /dev/video0 看到video0就对啦,如果找不到可能驱动不对,或者工作不正常,看看供电,装装驱动试试 2.安装必要的软件集: sudo apt-get install subversion sudo apt-get install libv4l-dev sudo apt-get install libjpeg8-dev 3.下载mipg-steamer软件,编译并安装: svn co https://mjpg-streamer.svn.sourceforge.net/svnroot/mjpg-streamer mjpg-streamer cd mjpg-streamer/mjpg-streamer make USE_LIBV4L2=true clean all make DESTDIR=/usr install 源有时候不问题可以改为: svn co https://svn.code.sf.net/p/mjpg-streamer/code/mjpg-streamer/ 4.运行考入树莓派中的源程序目录中的“stream.sh”文件: pi@raspberrypi:/home/camtank# sudo chmod 777 stream.sh pi@raspberrypi:/home/camtank# sudo ./stream.sh 在运行程序时,如果发生错误,可能是之前由于运行过,进程仍然在工作,导致没法再运行,可以先运行ps,查看运行中的进程和进程ID号,再使用“kill -9 ”杀掉进程 看到视频了,就说明摄像头工作正常了,到此摄像头的工作就结束了 教程二 组装和配置树莓派小车按照上面的调试成功摄像头后,就可以开始组装树莓派小车了。 第一步:按照下面的连接图,将树莓派,扩展板,小车底盘,摄像头,移动电源等连接起来:
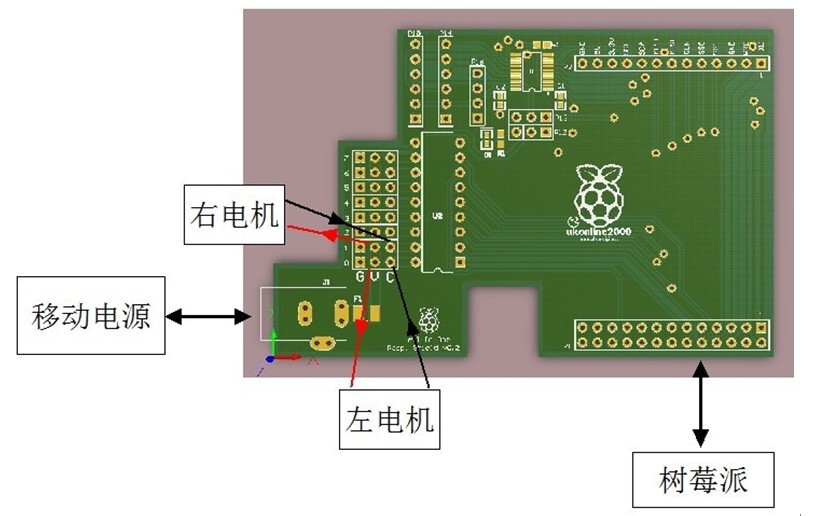
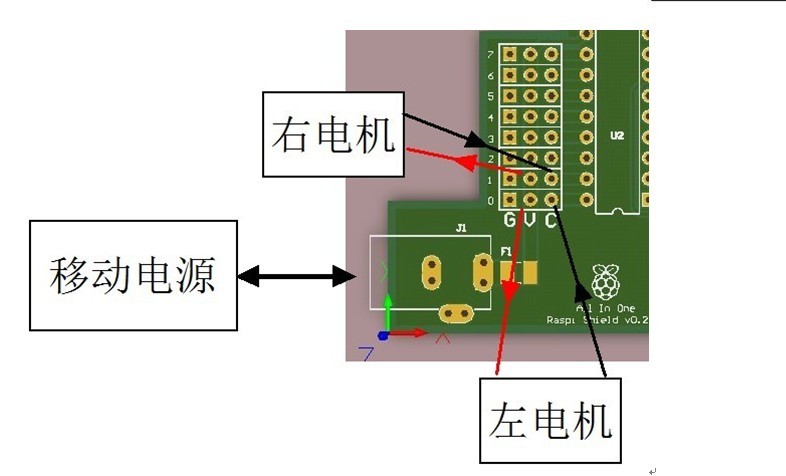
扩展板连接图:
第二步:运行考入树莓派中的源程序目录中的“stream.sh”文件:(源程序下载地址:cambot.zip) pi@raspberrypi:/home/camtank# sudo ./stream.sh 在运行程序时,如果发生错误,可能是因为之前运行过,进程仍然在工作,导致了不能再次运行,这时可以先运行ps,查看运行中的进程和进程ID号,再使用“kill-9”杀掉进程,然后再试一次。
第三步:运行考入树莓派中的源程序目录中的“camtank.py”文件:(源程序下载地址:) pi@raspberrypi:/home/camtank# python cantank.py
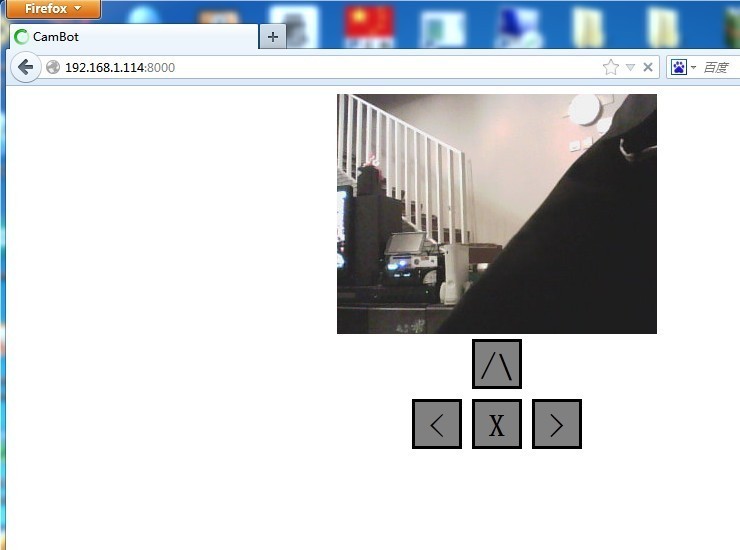
注:提示中”HTTP Server binded on ”行代表树莓派的监控ip地址,本例中为“http://192.168.1.114:8000”,端口为8000,ip地址为192.168.1.114 第四步:使用监控PC端或者手机端的浏览器登录第三步中提示的树莓派监控IP地址:
注:登录的密码和账号都为“cambot” 第五步:通过浏览器中视频下面的前进和左右键,控制小车 |


弱弱的问一句 camtank.py在哪里下载啊?
在压缩包中