
树莓派全能机器人扩展板:电机使用教程

产品简介
该扩展板是市面上唯一一款全功能的机器人扩展版,能够同时支持多路电机/步进电机/舵机(Stepper/Motor/Servo),并且可以多板层叠使用扩展出更多的控制接口,特别适合玩家DIY机器人,智能小车,机械手臂,智能云台等等各种应用。控制接口简单采用I2C接口,兼容3.3V/5V电平,因此也适用于市面上其它开发板。
购买链接:https://item.taobao.com/item.htm?id=524333358203
产品特点
1.单电源供电,正常工作电源电压范围为5V~12V;(请按照所控制的电机控制电压选用正确的输入电源的电压电流)
2.通过树莓派的I2C总线完成数据的输入/输出,
3.一路I2C接口,兼容5V电平,可接arduino或者其他开发板控制
4.一路I2C接口,可接各种传感器,扩展各种应用
5.扩展板地址由4个地址引脚决定,最大16块扩展板同时使用
6.支持16路PWM通道输出,可以控制16路舵机或者LED灯
7.12位分辨率,可调PWM频率高达1.6KHz,可配置的推挽或开漏输出
8.支持4路舵机接口,3P标准接口,方便连接舵机和LED灯
9.支持2路6V~12V的步进电机
10.支持4路6V~12V的减速电机
11.支持红外接收功能,方便红外控制
产品规格
工作电压:5V~12V
接口:I2C
尺寸:65x56x21mm
重量:0.02kg
产品接口说明
1. 4路舵机接口(#0,#1,#14,#15)
2. 4路电机接口(M1,M2,M3,M4)
3. 2路步进电机接口(M1+M2,M3+M4)
4. I2C接口
产品展示
多扩展板叠层效果:

外接传感器模块效果:

产品使用
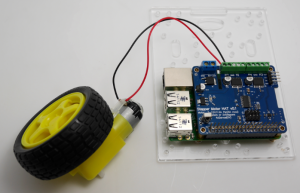
电机控制
扩展板可以支持5V~12V的直流减速电机(极限电流2A以下),注意请不要使用工作电压在4V以下的电机,会顺坏电源。
- 请使用raspi-config工具使能I2C功能
- 安装I2C相关软件
sudo apt-get install python-devapt-get install python-smbus i2c-tools
- 下载软件拷贝到树莓派中,并执行解压命令(Raspi_MotorHAT )
tar xvf Raspi_MotorHAT.tar
cd Raspi_MotorHAT
- 在电机接口端子M1,M2,M3,M4上连接好对应的电机
注意:电机的极限电流不能超过3A,否则会顺坏电路板
- 运行电机测试程序(测试程序为M3接口)
sudo python DCTest.py
- 程序使用简要说明
mh.getMotor(3) #电机端口号为M3
myMotor.setSpeed(150) #电机调速0~255,0为停止,255为最高速
Raspi_MotorHAT.FORWARD #前进
Raspi_MotorHAT.BACKWARD #后退
Raspi_MotorHAT.RELEASE #停止