官方Raspbian系统使用屏的步骤:
1.下载最新版树莓派官方系统
https://www.raspberrypi.org/downloads/raspbian/
2.配置config文件,使能I2C和SPI接口
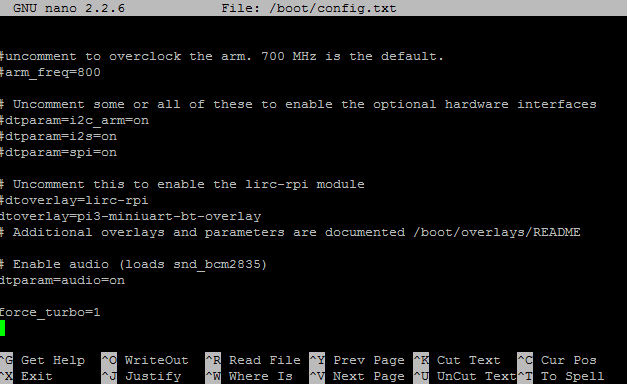
sudo nano /boot/config.txt
添加以下一行
dtparam=i2c_arm=on,spi=on
3.接配置config文件,开启屏幕
sudo nano /boot/config.txt
添加以下两行行
dtparam=i2c_arm=on,spi=on
dtoverlay=pitft22,rotate=270,speed=48000000,fps=30
注意:rotate为图像方向,可以配置为0,90,180,270,360
4.配置cmdline文件,让调试台显示在屏上
sudo nano /boot/cmdline.txt
在“rootwait”之前添加以下一行
fbcon=map:10 fbcon=font:VGA8x8
保存重启
5.让X在小屏幕中显示
sudo mv /usr/share/X11/xorg.conf.d/99–fbturbo.conf ~
sudo nano ~/.profile
在最后添加以下行
export FRAMEBUFFER=/dev/fb1
6.编辑配置文件, 添加屏幕设备
sudo nano /usr/share/X11/xorg.conf.d/99-pitft.conf
添加以下行
Section “Device”
Identifier “PiTFT”
Driver “fbdev”
Option “fbdev” “/dev/fb1”
EndSection
7.使用raspi-config工具,配置自动启动图形界面
sudo raspi-config
选择“BOOT Options”,选择“B1 Desktop / CLI”,然后选择”Desktop Autologin Desktop GUI“,保存重启
注意如果没法启动图形界面的玩家,可能是因为新系统中少安装了一个组件,按照下面命令安装一下,重启就正常了:
sudo apt-get install xserver-xorg-video-fbdev
红外接收功能使用参考:http://ukonline2000.com/?p=296
背光打开关闭命令:
gpio -g mode 27 in
gpio -g mode 27 out
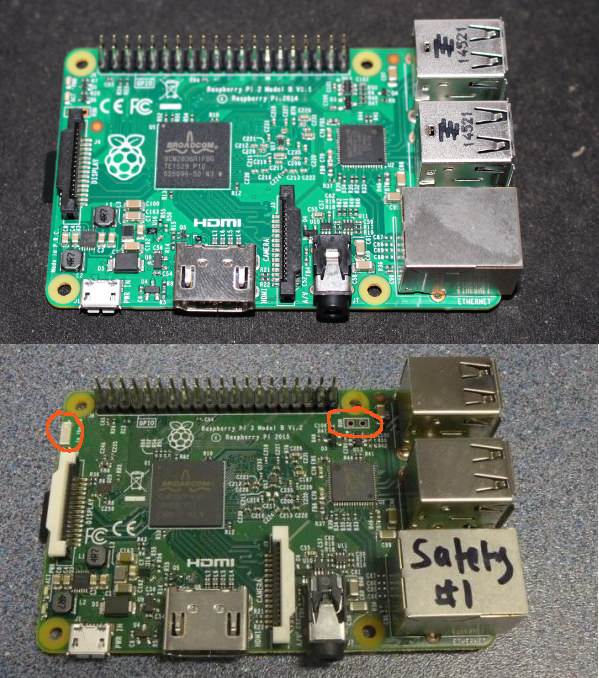
将按键开关配置为安全开关机按键步骤:
1.配置config文件,开启按键开关机功能
sudo nano /boot/config.txt
添加以下一行
dtoverlay=gpio-poweroff,gpiopin=23,active_low
注:“23”代表作为开关的GPIO,你可以修改这个值去配置扩展板上的任意按键。
2.然后保存退出,重启