树莓派GPIO扩展DIY开发套件发布!!!!
很多朋友想用树莓派做各种小试验,但是苦于各种连线不方便,树莓派的GPIO又没有对应的表示,所以有了才想到做个套件,套件包含彩虹排线+面包板+GPIO转接板,当然也可单独购买!
套装购买地址:http://item.taobao.com/item.htm?id=17492589793
彩虹排线:
面包板:
GPIO转接板:
套装:
效果图:

树莓派GPIO扩展DIY开发套件发布!!!!
很多朋友想用树莓派做各种小试验,但是苦于各种连线不方便,树莓派的GPIO又没有对应的表示,所以有了才想到做个套件,套件包含彩虹排线+面包板+GPIO转接板,当然也可单独购买!
套装购买地址:http://item.taobao.com/item.htm?id=17492589793
彩虹排线:
面包板:
GPIO转接板:
套装:
效果图:
推荐几款非常棒的树莓派安卓应用,有了它们,真是如虎添翼呀,玩机必备呀!!!!
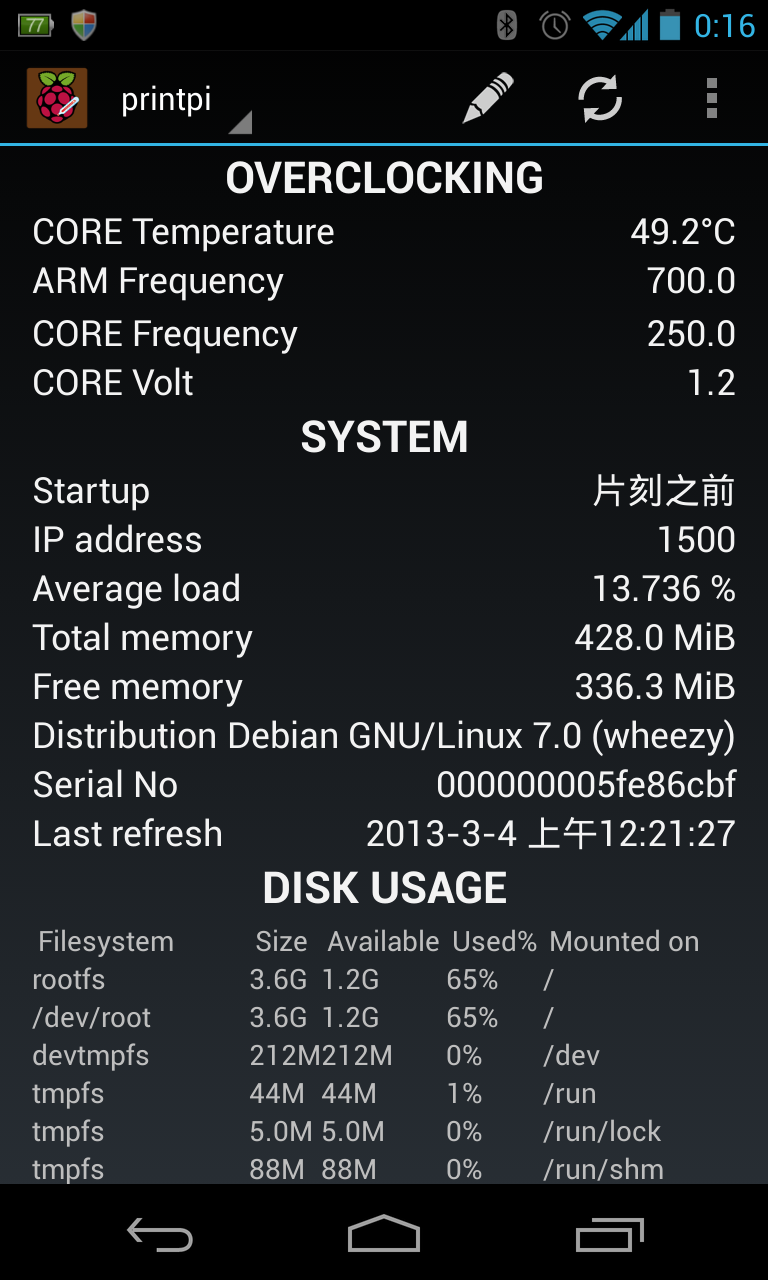
1.Raspi Check 用来检测树莓派的运行状态,如果你把树莓派当服务器时,这款软件就非常适合安装了,可以查看到CPU,内存,硬盘,温度,进程状态等等:

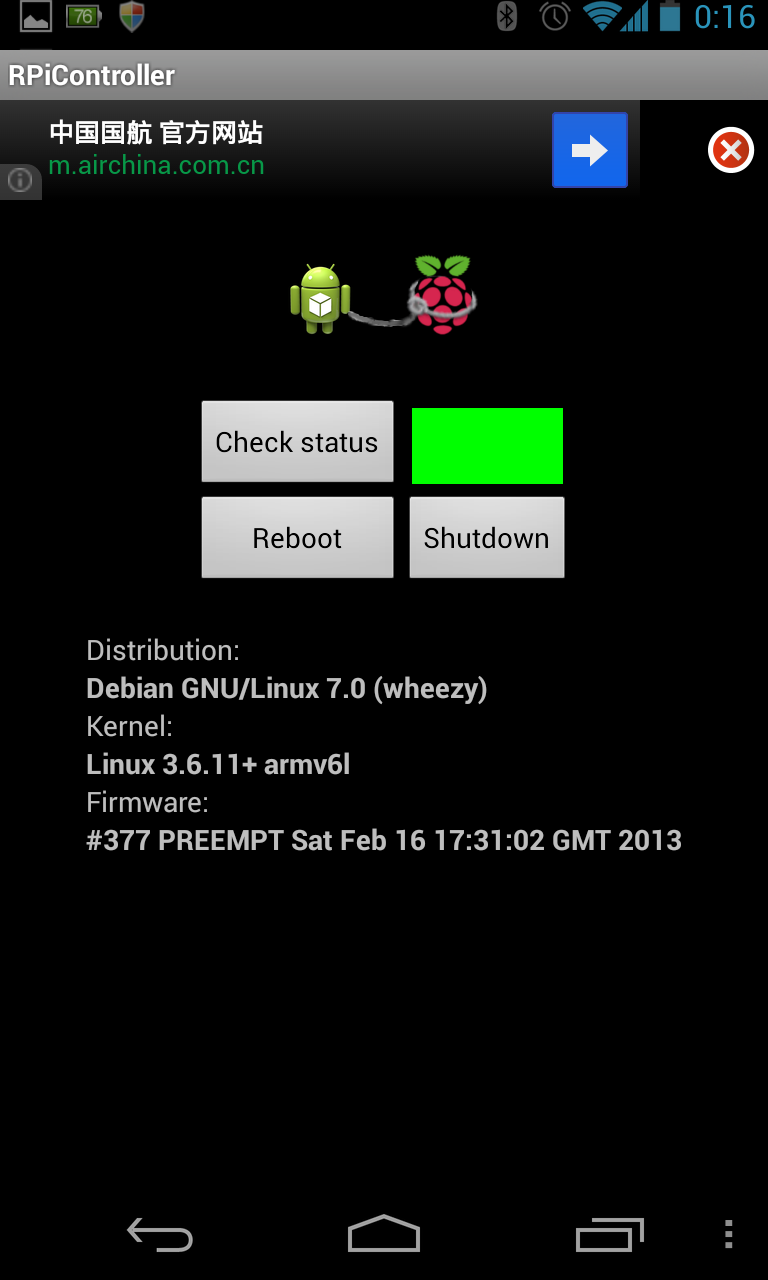
2.RaspberryPi Controller ,用于远程对树莓派进行重启,关机,检测树莓派的状态

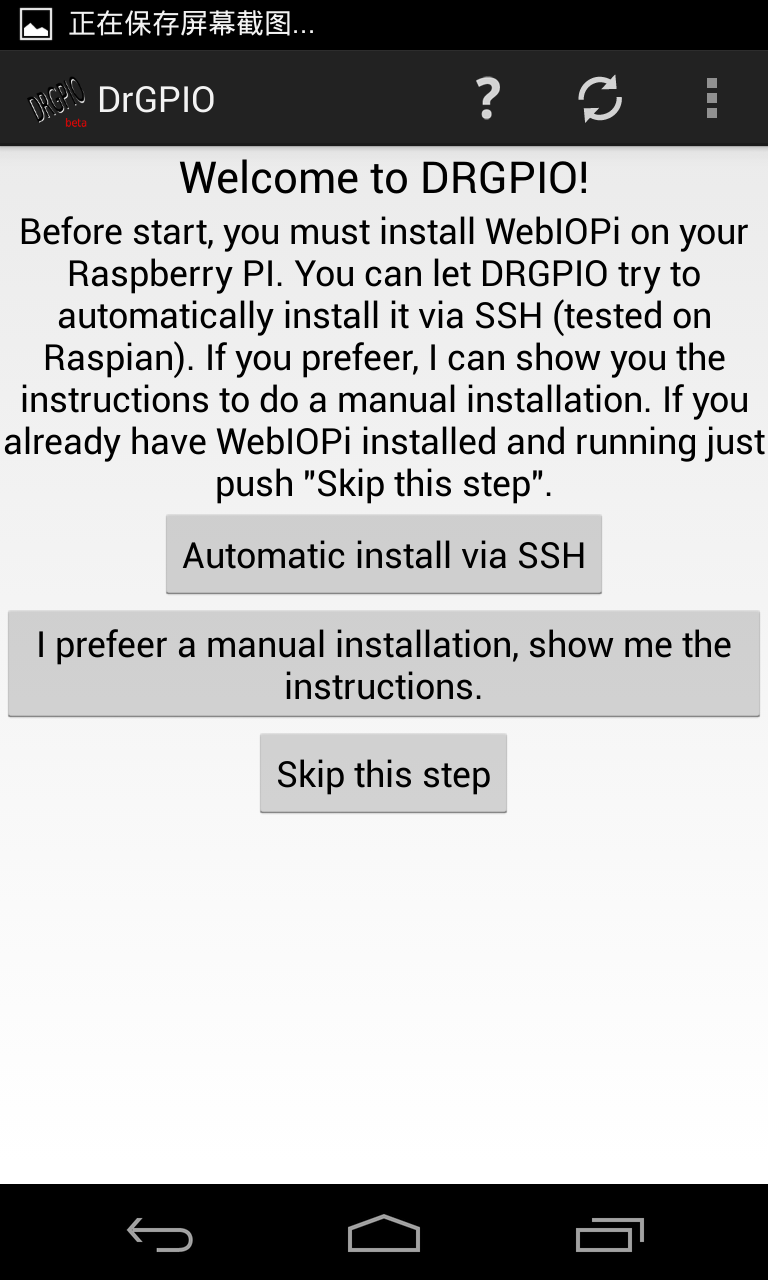
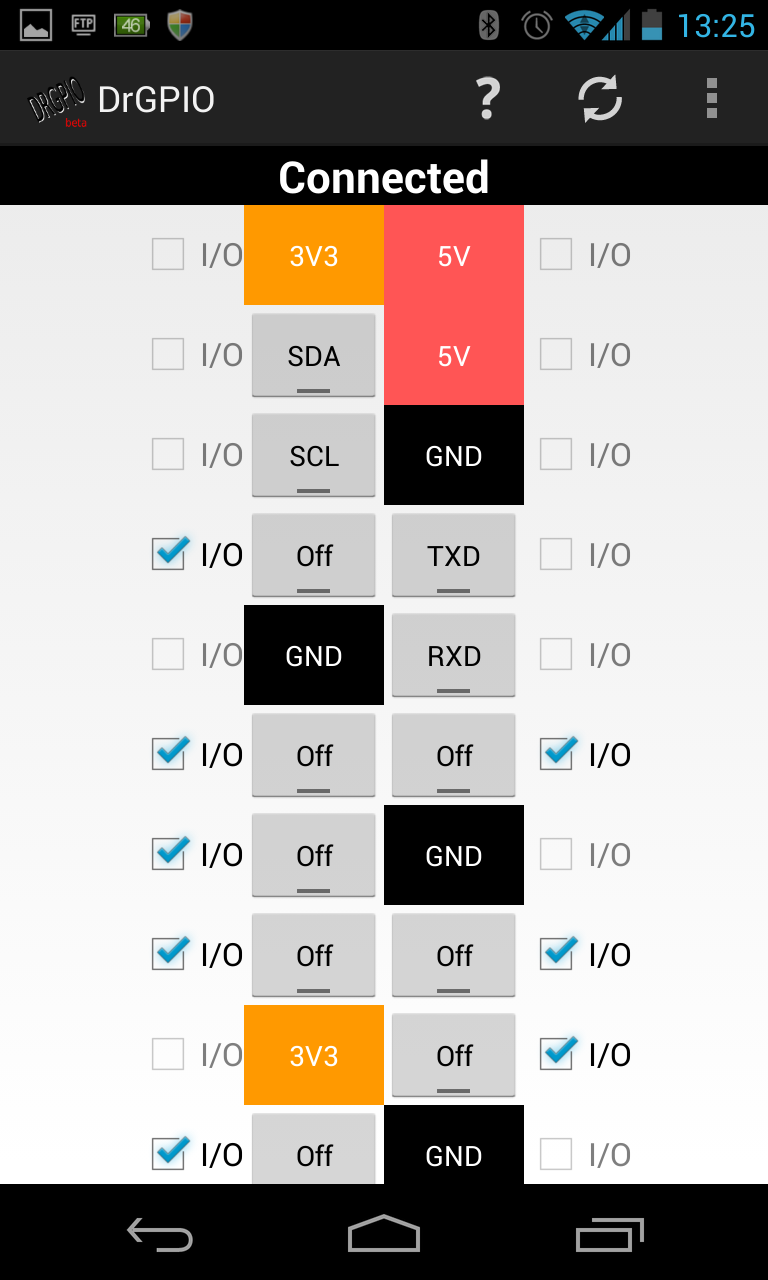
3.DrGPIO,用来远程手机控制树莓派的GPIO扩展,不错的应用
需要在树莓派上安装对应的程序,并运行,可以参考安装http://ukonline2000.com/?p=75
或者使用手机端的自动安装
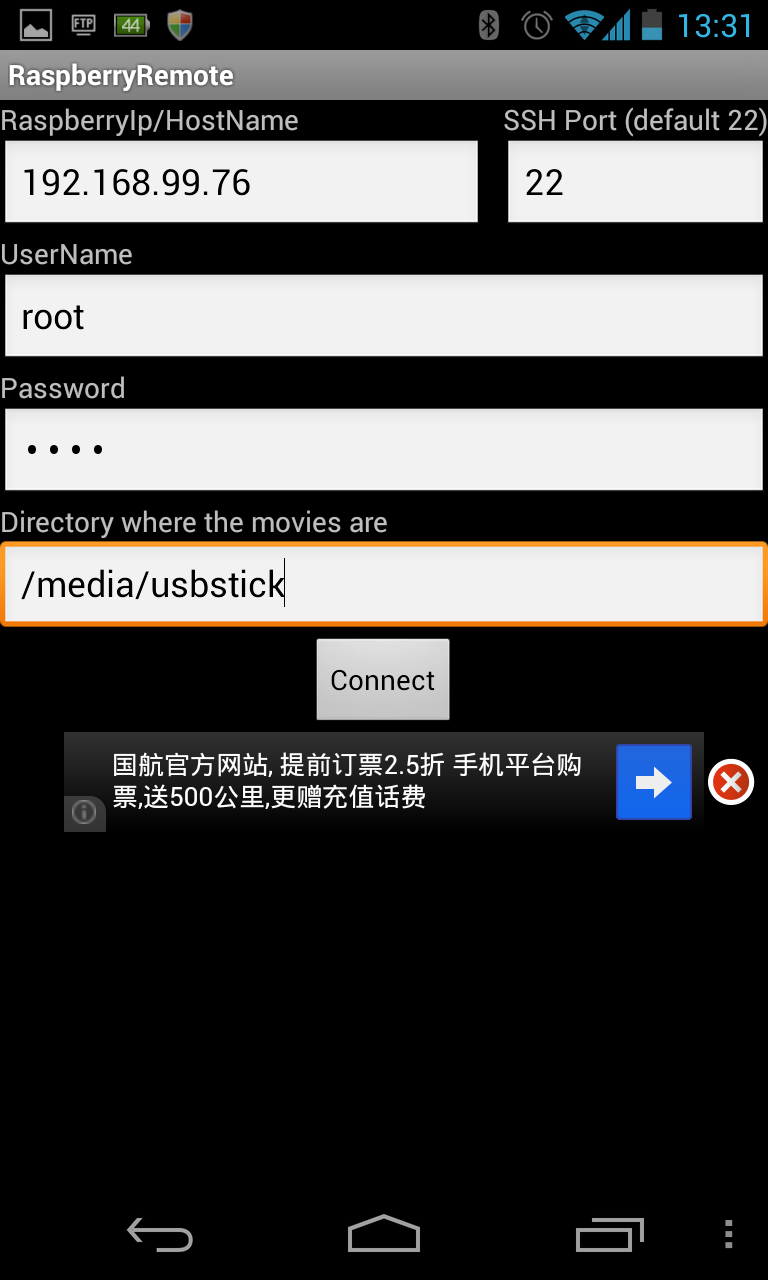
4.Raspberry Pi Remote Control,用于远程控制树莓派播放音频和视频

最近买了一个打印机,只有usb接口没有网口,也不支持网络打印,就打算用树莓派来做一个打印机服务器,废话不说,教程走起!!!

准备工作:
1.连接网络的树莓派
2.usb接口的打印机
步骤如下:
1.安装CUPS软件,”CUPS“是linux下可以用通用打印系统(百度百科http://baike.baidu.com/view/887944.htm)
sudo apt-get install cups
2.允许pi用户配置CUPS
sudo usermod -a -G lpadmin pi
3.备份替换CUPS配置:
关闭服务
sudo service cups stop
备份配置文件
sudo mv /etc/cups/cupsd.conf /etc/cups/cupsd.conf.bak
替换配置文件(root用户去掉“sudo”)
sudo cd /etc/cups/ && sudo wget http://jxeeno.tk/local–files/blog:raspberry-pi:print-server/cupsd.conf
重启服务
sudo service cups start
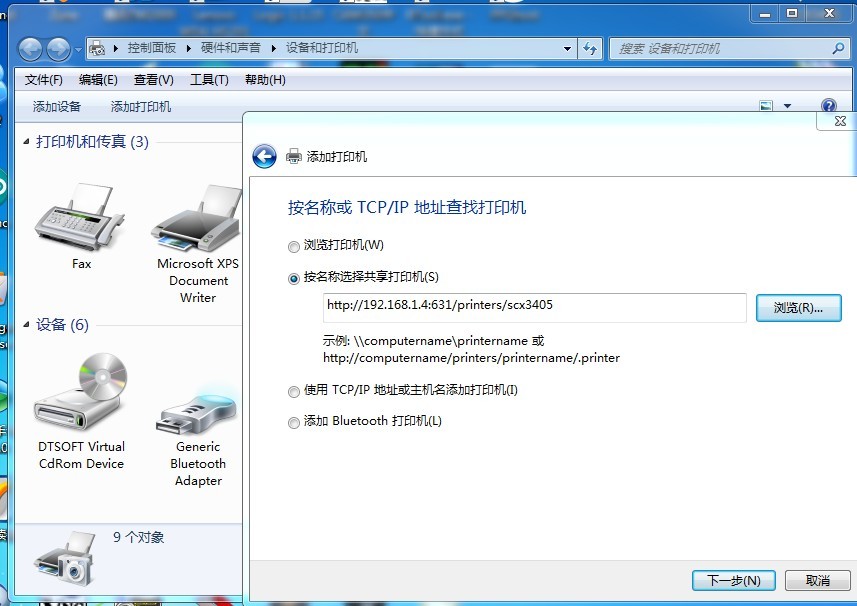
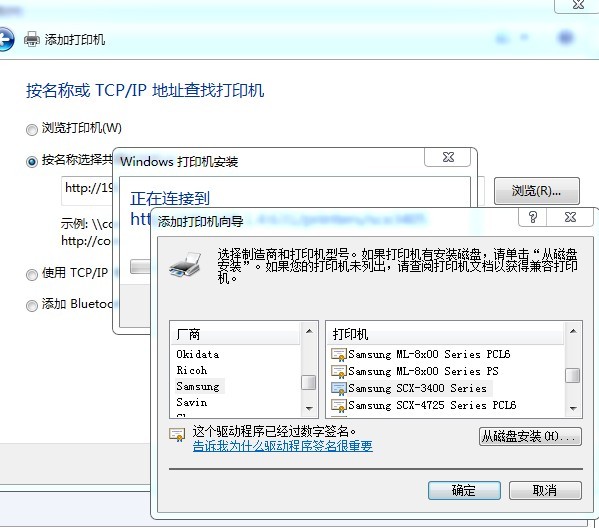
4.PC端用IE浏览器打开网站“https://树莓派ip:631/ ”

5.点击“Administrator”界面添加对应的打印机,登录帐号和密码是树莓派的pi用户的密码


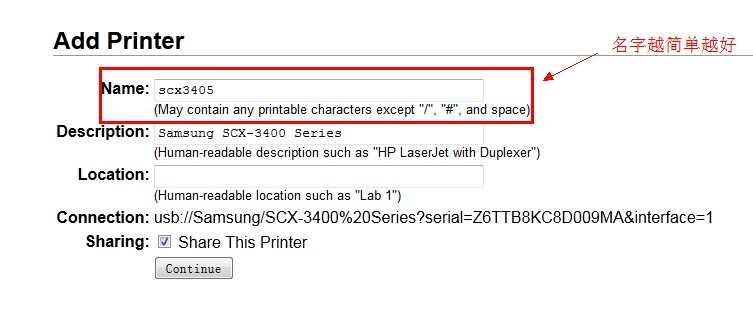
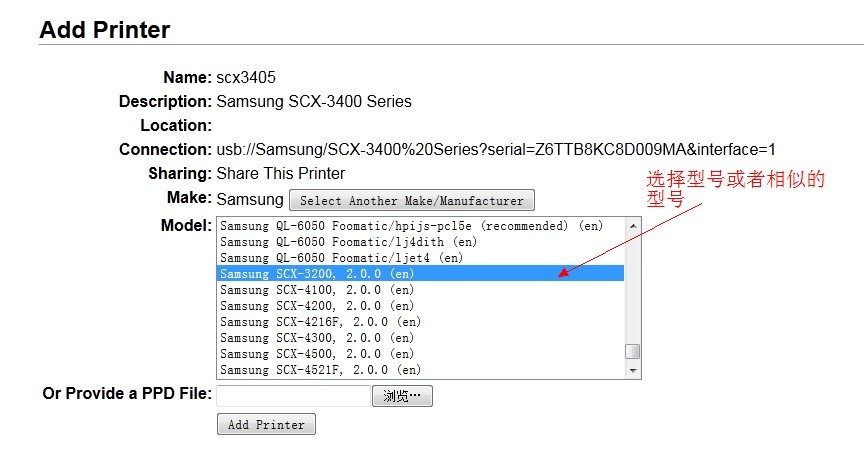
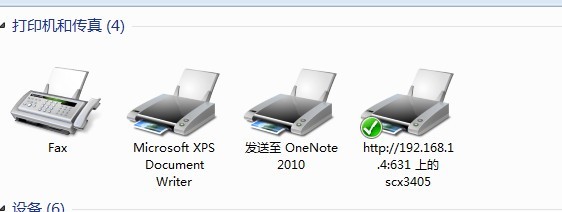
在local printers中找到usb连接的打印机,打印机名“scx3405”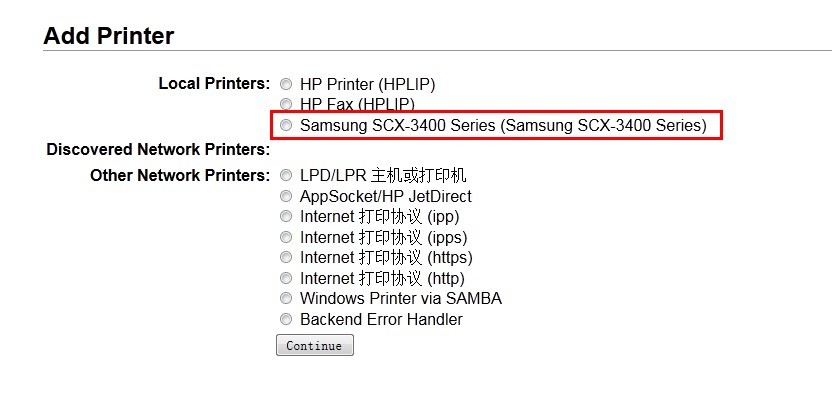
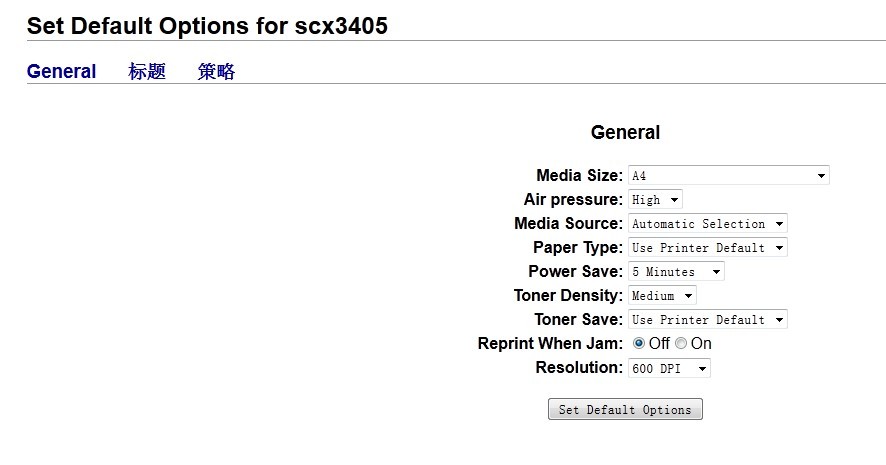
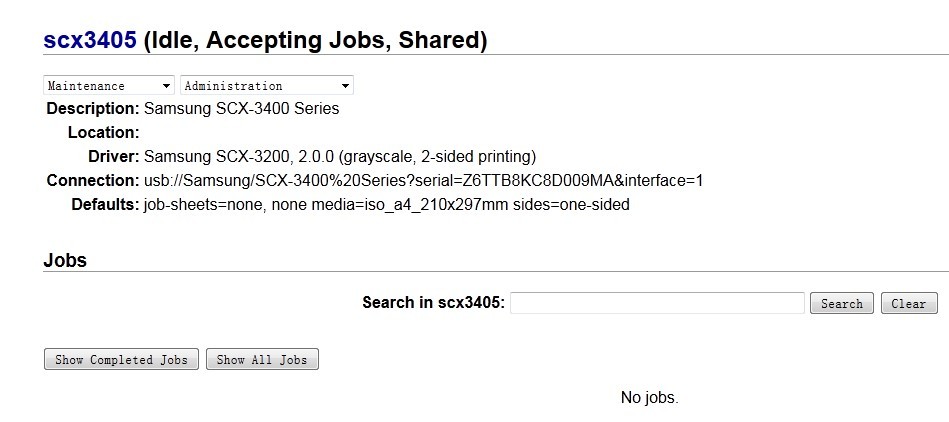
到此树莓派的打印机设置就完成了!
6.网络打印机的地址“http://树莓派ip:631/printers/brother ”,PC端按照此地址添加网络打印机和驱动就行了

实现步骤:
1.按照RTC时钟模块的I2C接口定义和对应的扩展版I2C接口互联,下图是全功能板+本论坛的RTC时钟模块,也可以按照对应的管脚直接和树莓派的GPIO连接
2.安装I2C模块方法
a.添加i2c模块
sudo nano /etc/modules
然后添加以下两行内容
i2c-bcm2708
i2c-dev
b.安装i2c工具,查看i2c设备
sudo apt-get install i2c-tools
c.执行命令查看i2c设备
sudo i2cdetect -y -a 0
注意如果是512M版本请吧“0”换成“1”

上图可以看到“77”就是检测到了I2C设备,地址是“77”
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~““
4.过几几分钟拔掉网线,然后重启,输入“date”看看时间是不是应该同步上了,呵呵
序:
写这个目的是想让大家通过教程能根据自己的需求制作出属于自己的机器人,所以将系列教材打算按照机器人的几个重要功能的组成部分,分别介绍!!!首先给大家介绍的是机器人的控制功能,分为两部分介绍,一部分是无线控制,一部分是有线控制!
一、无线控制
无线控制就是通过无线的方式实现对机器人的控制,以下内容是以“Wii的右手柄”为例大家做一个简单的参考:
btw:为什么选wii的右手柄呢,原因就是价格便宜,功能多,实现简单,
准备工作:
1.树莓派一个
2.蓝牙适配器一个,x宝大概8元以内
3.Wii 右手柄一个,x宝大概60元左右

操作步骤:
1.在蓝牙适配器插上树莓派,然后树莓派上电

2.树莓派启动后,输入以下命令,查看是否能检查到蓝牙适配器(如果找不到请拔下蓝牙适配器,再插上试试)
lsusb

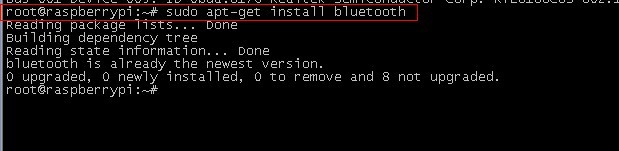
3.安装蓝牙工具,输入命令
sudo apt-get install bluetooth
4.查看蓝牙软件是否正常启动,输入命令
sudo service bluetooth status

如果显示没有打开蓝牙,输入以下命令后再重启试试:
/etc/init.d/bluetooth start
5.查看蓝牙适配器是否正常工作,输入命令
hcitool dev

6.将Wii右手柄装上电池,同时按下手柄上的“1”和“2”键直到手柄上的蓝灯闪烁,然后在树莓派输入搜索命令:
hcitool scan
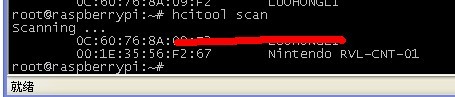
如果找不到“Nintendo ”项,请重复步骤6,如果多次还是不成功,请打开手柄电池仓盖,找到红色点的按键按下,然后输入搜索命令。
到此,一切就设备工作正常了,接下来就要完成如果实现手柄控制功能:
7.安装python的Wii手柄库,输入命令
sudo apt-get install python-cwiid

8.下载wii的demo程序wiidemo,解压并考入树莓派中运行:
python wiidemo.py
btw:按照提示运行程序后按照提示,同时按下1+2键不放,直到新的提示信息出现如下图(如果提示错误请重复该步骤)
9.demo程序使用,树莓派键盘选择各项测试:
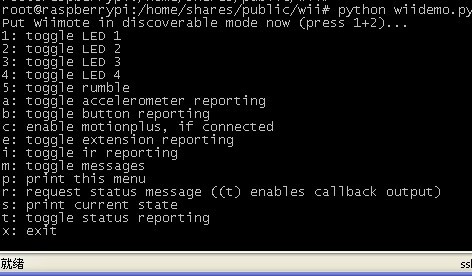
1: toggle LED 1 //LED1灯亮,再选一次就灭
2: toggle LED 2 //LED2灯亮,再选一次就灭
3: toggle LED 3 //LED3灯亮,再选一次就灭
4: toggle LED 4 //LED4灯亮,再选一次就灭
5: toggle rumble //震动开启,再选一次震动关闭
a: toggle accelerometer reporting //加速度提示,老手柄需要给有手柄配上加速度的转接器motionplus才行,新款手柄带此功能
b: toggle button reporting //按键状态显示
c: enable motionplus, if connected //使能motionplus转接器
e: toggle extension reporting //扩展信息显示
i: toggle ir reporting //显示红外信息
m: toggle messages //显示信息,再选一次就关闭信息
p: print this menu //重新显示目录
r: request status message ((t) enables callback output) //反馈状态信息
s: print current state //打印当前状态
t: toggle status reporting //显示状态信息
x: exit //退出
大家可以一个一个试试,看看效果,然后根据demo中的例程将各种功能应用到机器人的控制和反馈中!!!!
树莓派的GPIO只有一路硬件PWM,但是新版的树莓派又把这个管脚替换了,导致就不再支持硬件的pwm了,所以考虑用软件来实现pwm,也就是softpwm,程序是用老外的python改的,这样就能比较方便那些需要用树莓派控制步进电机或者需要pwm的朋友,希望能对大家有所帮助!!!
使用装备
1.树莓派(512M版本)
2.树莓派全功能扩展板 (详见http://www.eeboard.com/bbs/forum.php?mod=viewthread&tid=1372&page=1&extra=#pid4695)
3.diy过的流水灯
操作步骤:
1.安装RPI.GPIO库,参考帖子http://ukonline2000.com/?p=43
2.下载PiSoftPwm软件,地址 PiSoftPwm.zip (2.68 KB, 下载次数: 1)
PiSoftPwm.zip (2.68 KB, 下载次数: 1)
3.拷贝到树莓派中,并运行例程
python example.py
备注:例程是针对512M版本的树莓派,256M版本的树莓派,请打开example.py文件,找到这两行
third = PiSoftPwm(0.01, 100, 27, GPIO.BCM) #for raspberry pi rev 2.0
改为
#third = PiSoftPwm(0.01, 100, 27, GPIO.BCM) #for raspberry pi rev 2.0
third = PiSoftPwm(0.01, 100, 21, GPIO.BCM) #for raspberry pi rev 1.0
例程中有部分函数使用的介绍,修改时可以参考
一直在考虑如何在树莓派上使用硬件”看门狗“,用来防止树莓派死机,想过外加单片机,也想过用软件实现软看门狗,但是都不是很可靠,今天发现了一个老外的帖子,原来树莓派的CPU是保护有硬件看门狗的,可以通过安装模块和值守程序来实现看门狗,防止树莓派死机!!!
安装看门狗:
1.加载看门狗模块,编辑/etc/modules文件,添加一行”bcm2708_wdog”
sudo modprobe bcm2708_wdog sudo nano /etc/modules

2.安装系统配置软件和看门狗程序
sudo apt-get install chkconfig sudo apt-get install watchdog


3.配置看门狗程序,编辑“/etc/watchdog.conf”文件
sudo nano /etc/watchdog.conf
去掉 watchdog-device = /dev/watchdog 前的#号,让看门狗设备对应树莓派的硬件看门狗
![]()
去掉 max-load-1 = 24 前的#号,当1分钟load进程超过24个的时候(一般5个就是超高负载了,再高可以认为是死机,这在遭遇DDOS攻击的时候很容易遇到)就会触发重启

还可以设置高温复位:
去掉
temperature-device =
max-temperature = 120
前的#号,改为
temperature-device = /sys/class/thermal/thermal_zone0/temp
max-temperature = 80000
温度超过80度就会引起重启,保护CPU
![]()
配置完后,保存(Ctrl+O),退出(ctrl+x)
4.配置看门狗程序,开机自动运行
chkconfig watchdog on
5.启动看门狗
sudo /etc/init.d/watchdog start
到这里就配置完成看门狗了,大家可以试试输入下面的符号,这个符号可以引起树莓派死机,如果看门狗正常的话,等一会就能复位了

最后要感谢原作者的分享:http://pi.gadgetoid.co.uk/post/001-who-watches-the-watcher
1.配置ip地址
编辑sudo nano /etc/network/interfaces
自动获取ip的配置:
auto eth0
allow-hotplug eth0
iface eth0 inet dhcp
手动配置ip:
auto eth0
iface eth0 inet static
address 192.168.0.7
netmask 255.255.255.0
gateway 192.168.0.254
2.配置DNS
编辑 sudo nano /etc/resolv.conf
domain lan
search lan
nameserver 192.168.1.1
nameserver 192.168.99.100
注:nameserver 后面的ip就是dns服务器,根据自己的运营商情况填吧
前段时间做了一个逻辑分析仪,支持Logic,USBee Suite,USBee AX Pro,可以分析uart,spi,iic,rs485,can总线等接口协议,非常方便大家调试开发板的这些接口,废话不说,上图吧!由于树莓派的接口比较丰富,uart,spi,iic都有,所以用来调试树莓派是非常棒的工具!届时会组织团购的,希望的童鞋请密切关注
ps.壳子是100mhz兄弟设计的,非常漂亮,呵呵



逻辑分析仪和树莓派


“SqueezePlug”是树莓派专用的媒体服务器系统,是一个多种媒体服务器的综合系统,目前版本为5.0,官方的地址为:http://squeezeplug.de/
系统中包括以下功能:
– Logitech Media Server (f.k.a. Slimserver, SqueezeBox Server)
– MiniDLNA
– MPD
– Mediatomb
– Twonky
– Forked DAAPD
And SqueezePlug is a platform for different Media-clients or players:
– SqueezeSlave
– SqueezePlay (experimental)
– Shairport
– Omxplayer
And SqueezePlug offers some other services
– Crashplan
– Owncloud
All these servers and players are ready to install by just a click.
Included features are:
– Scripts for all SqueezePlug configurations
– Expand RootFS automatically
– Create a Swap File
– Change Timezone, Hostname, Password, SSH-Keys,
– Configure Network Settings
– Support for wireless USB-Sticks
– Change Overclocking and Memory Spilt
– Handling of external drives
– Cloning SD-Cards
– Samba Server already included
– HD-Idle included
– Update functions included
安装:
1. 下载系统镜像并写入SD卡中(系统镜像下载:http://www.squeezeplug.eu/?page_id=52)
2. 启动pi,并且查询pi的IP地址
3. 登入系统,用户名: root 密码: nosoup4u
4. 配置媒体服务器
运行安装视频: